
Découvrir Offpt : Formation Avancée en Électromécanique pour les Étudiants du Bac 2024
- 10 Jul, 24
- karim electro
Un projet amusant et éducatif pour apprendre la robotique et la programmation.
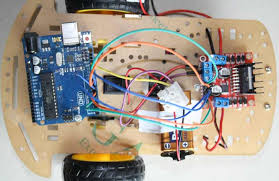
Construire une voiture télécommandée est un excellent projet pour les débutants en robotique. Ce tutoriel vous guide à travers les étapes pour construire et programmer une voiture télécommandée utilisant un Arduino et un module Bluetooth HC-05.
Exemple de Projet : Voiture Télécommandée
Matériel requis :
Étapes du Projet :
Code Arduino :
#include <AFMotor.h>
#include <SoftwareSerial.h>
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
SoftwareSerial BTSerial(10, 11);
char command;
void setup() {
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop() {
if (BTSerial.available()) {
command = BTSerial.read();
executeCommand(command);
}
}
void executeCommand(char cmd) {
switch (cmd) {
case 'F':
forward();
break;
case 'B':
backward();
break;
case 'L':
left();
break;
case 'R':
right();
break;
case 'S':
stop();
break;
}
}
void forward() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void left() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}
void right() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
void stop() {
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}Vous devez vous connecter OU vous inscrire pour commenter.


Commentaires (0)