
Découvrir Offpt : Formation Avancée en Électromécanique pour les Étudiants du Bac 2024
- 10 Jul, 24
- karim electro
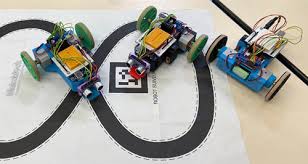
Apprendre la robotique et la programmation en construisant un robot suiveur de ligne.
Le robot suiveur de ligne est un projet classique pour les amateurs de robotique. Il permet d'apprendre les bases de la programmation et du contrôle des moteurs. Dans ce tutoriel, nous vous guiderons à travers les étapes de la construction d'un robot suiveur de ligne utilisant un Arduino Uno.
Exemple de Projet : Robot Suiveur de Ligne
Matériel requis :
Étapes du Projet :
Code Arduino :
const int leftSensor = A0;
const int rightSensor = A1;
const int motorLeftForward = 9;
const int motorLeftBackward = 10;
const int motorRightForward = 5;
const int motorRightBackward = 6;
void setup() {
pinMode(leftSensor, INPUT);
pinMode(rightSensor, INPUT);
pinMode(motorLeftForward, OUTPUT);
pinMode(motorLeftBackward, OUTPUT);
pinMode(motorRightForward, OUTPUT);
pinMode(motorRightBackward, OUTPUT);
Serial.begin(9600);
}
void loop() {
int leftValue = analogRead(leftSensor);
int rightValue = analogRead(rightSensor);
Serial.print("Left Sensor: ");
Serial.print(leftValue);
Serial.print(" | Right Sensor: ");
Serial.println(rightValue);
if (leftValue > 500 && rightValue > 500) {
// Avancer
digitalWrite(motorLeftForward, HIGH);
digitalWrite(motorLeftBackward, LOW);
digitalWrite(motorRightForward, HIGH);
digitalWrite(motorRightBackward, LOW);
} else if (leftValue < 500 && rightValue > 500) {
// Tourner à gauche
digitalWrite(motorLeftForward, LOW);
digitalWrite(motorLeftBackward, LOW);
digitalWrite(motorRightForward, HIGH);
digitalWrite(motorRightBackward, LOW);
} else if (leftValue > 500 && rightValue < 500) {
// Tourner à droite
digitalWrite(motorLeftForward, HIGH);
digitalWrite(motorLeftBackward, LOW);
digitalWrite(motorRightForward, LOW);
digitalWrite(motorRightBackward, LOW);
} else {
// Arrêter
digitalWrite(motorLeftForward, LOW);
digitalWrite(motorLeftBackward, LOW);
digitalWrite(motorRightForward, LOW);
digitalWrite(motorRightBackward, LOW);
}
delay(100);
}Vous devez vous connecter OU vous inscrire pour commenter.


Commentaires (0)